

「カラーカメラはモノクロカメラを兼ねない」と言って、モノクロ画像が欲しいなら、カラーカメラで画像を撮影して、モノクロ画像に変換すればいいのでは?!
と私が工業用のカメラを扱う業界に属するようになる前はそう思っていました。
実際、カラーカメラもモノクロカメラも画素数が同じであるのなら値段も、ほとんど変わりません。
なら、やっぱりカラーの方がお買い得!!
と思ったりもします。
監視カメラのように画像を漠然と撮影する用途であれば、確かに、カラーカメラを買っておけばそれで、十分という場面もあるかと思いますが、マシンビジョンの世界では、0.1mmのキズを検査するのに3画素分で撮影して、欠陥を見つける!というように、1画素あたりの撮影分解能が重要な場合が多くあります。
このような場合、色情報が特に必要でない限り、モノクロカメラを用いた方が圧倒的に有利となります。
なぜか?
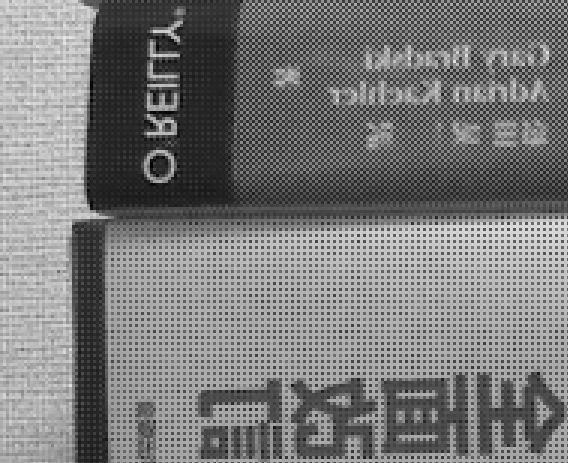
それを考える前に液晶TVなどでは、どのようにしてカラー画像を作り出しているのか?というと下の用な画像において

四角の部分を拡大したのがこちら↓
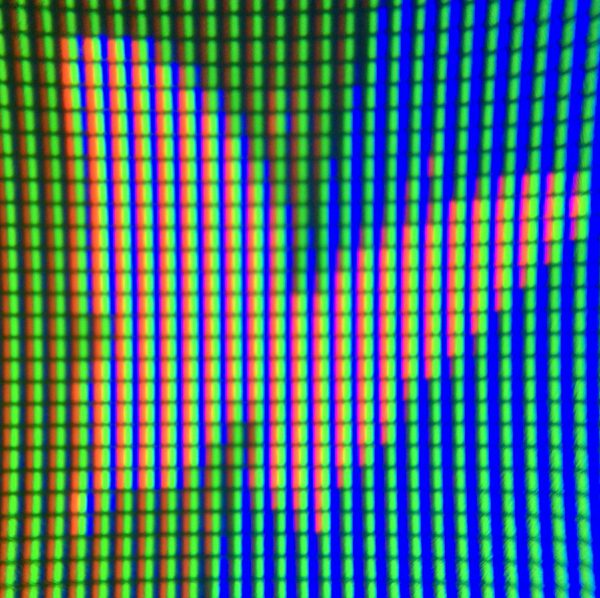

撮影の都合で画像が歪んでしまっておりますが、それは気にしないでもらって、上図のように縦長のR,G,Bの画素が3つずつ並んでおり、光の三原色である赤、緑、青の3色の色のバランスを調整することで、液晶モニタ全体としては、カラーの画像として見ることができのは比較的知られているのではないでしょうか?
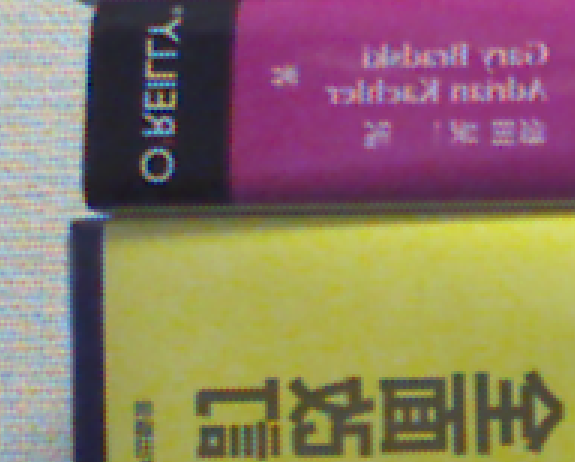
この、液晶モニタにおいて、もし、モノクロの液晶モニタがあったとしたら、R,G,Bの画素の部分1つ1つがモノクロの画素となるので、横方向に3倍、解像度を上げることができそうだという事は理解して頂けると思います。
それでは、カメラ(センサ)のしくみはどのようになっているのか?というと、
上記ページでも紹介しておりますが、モノクロのセンサ

の1画素1画素にR,G,BのBayerパターンと呼ばれる配置↓
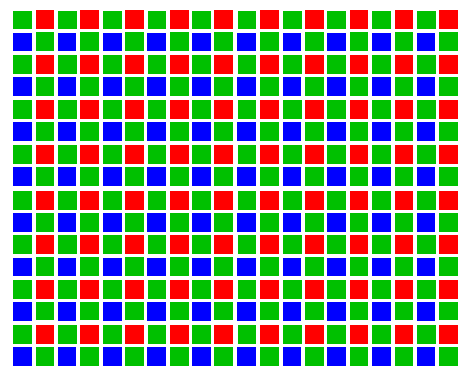

で、光学的フィルタが取付られたものが、カラーセンサとなります。
こんなイメージ↓
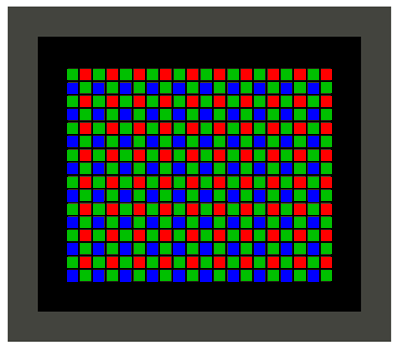

もともと構造的にはモノクロのセンサと同じセンサの上にR,G,Bのフィルタを付けただけなので、RとBの画素数は全体の1/4、Gの画素数は1/2の画素数しかありません。
このセンサを使ってカラー画像にするのには、例えば赤の画素の位置では、上下左右に緑の画素があるので、その画素から緑の輝度値を補間し、同様に斜め方向に青の画素があるので、青の輝度値を補間して、不足している輝度値を算出し、それぞれの画素において、R,G,Bの輝度値として、カラー画像を生成します。
このようにして、結果として、カラーカメラではモノクロカメラと同じ画素数分だけR,G,Bのデータを取得しているのですが、あくまでも補間してR,G,Bの輝度値を得ている場所が多いという事に注意して下さい。
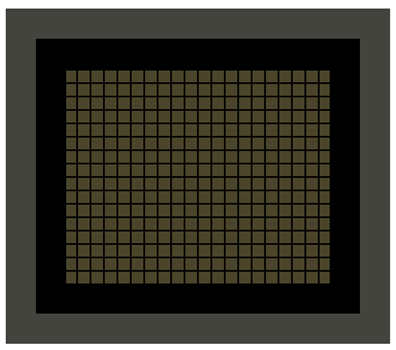
実際に、このようなセンサで撮影した生のデータ(RAWデータ)は、下図のようになります。

カラーセンサであっても、センサの構造的にはモノクロセンサと変わらないので、センサから出てくる生のデータは市松模様をしたモノクロデータとなります。
これを単純な補間方法でカラー画像に変換すると、

このように、エッジ部分がギザギザしたカラー画像となってしまいます。
こうならないようにカメラメーカ各社は、様々なノウハウで綺麗なカラー画像へと変換しています。
例えばデジカメでいうところの画像処理エンジンと呼ばれる、ニコンでいうとEXPEED、キヤノンのDIGICがこのカラー画像への変換処理を担っています。
割と単純なフィルタ処理をするだけでも、このように↓なるのですが、こうなると、もともとの生データがギザギザしていたことを忘れてしまいますね。


このようにカラーカメラは、ほとんどの画素が補間により作り出された画素であることから、数画素レベルの解像度が重要となる場合の多いマシンビジョンにおいては、「カラーカメラはモノクロカメラを兼ねない」となります。
数画素レベルの解像度が重要でしかもカラーが必要な場合には、R,G,Bそれぞれのセンサを用いた3CCDカメラや、モノクロカメラのレンズの前に、R,G,Bのフィルタを配置して、フィルタを切り替えながら3回R,G,Bの画像を撮影し合成することでカラー画像を生成したり、照明をR,G,B、3回に分けて撮影することで、カラー画像を生成する場合もあります。

これらのことから、工業用のカメラでは、なんで今どきモノクロカメラを使う場合が多いんだろう?
と昔は思っていたのですが、あえてモノクロカメラを使った方が解像度的には有利になるという点が重要です。
←マシンビジョンへ戻る







