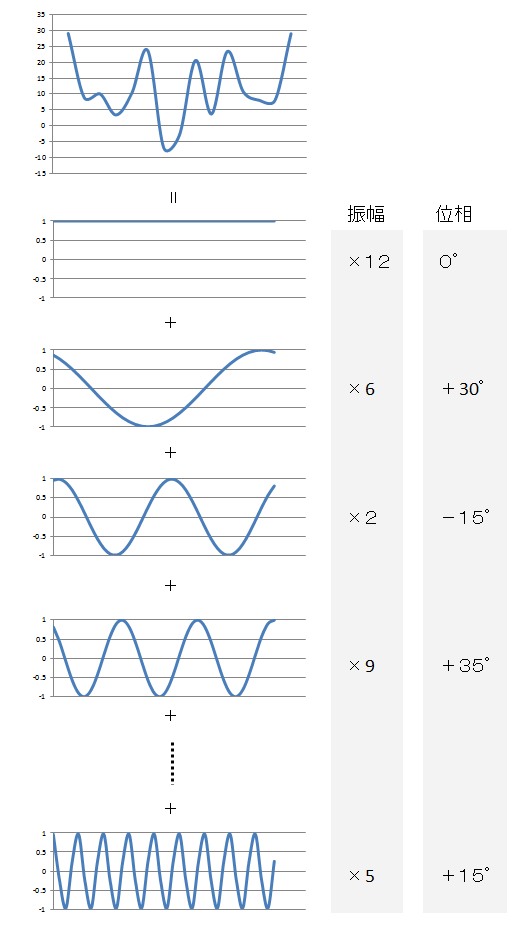
離散フーリエ変換を勉強すると、突然
eiθ = cosθ + i sinθ
みたいな式が突然出てきて、これが何だかよく分からないまま、とりあえず公式だけを覚えてみたり...
しかも i は「実際には存在しない虚数」みたいに教わったので、存在しない物は、なかなかイメージもしにくい。
で、いろいろ調べてみて、今ではなんとなく
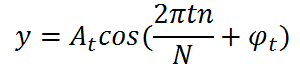
eiθ は複素平面における 長さ1、傾きθ のベクトル
ぐらいの認識でいます。

複素平面ではX軸に相当する部分が実部(Real part)、Y軸に相当する部分が虚部(Imaginary part)と呼ばれます。
回転方向は反時計まわりが正で時計まわりが負となります。
よく e-iθ というのも目にしますが、これはむしろ ei(-θ) と 書いてくれた方が分かりやすいと思いますが、e-iθ は、回転方向がマイナス、つまり時計まわりになります。
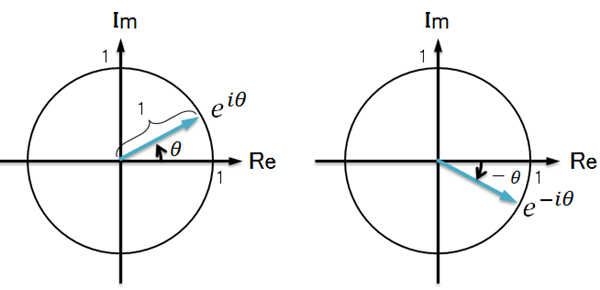
また、eiθ の頭に係数が付く場合がありますが、その係数分だけベクトルの長さが変化します。
例えば 2eiθ の場合だと

のようにベクトルの長さが2となります。
係数の値が負の場合は、ベクトルの向きが逆になり、-2eiθ の場合だと
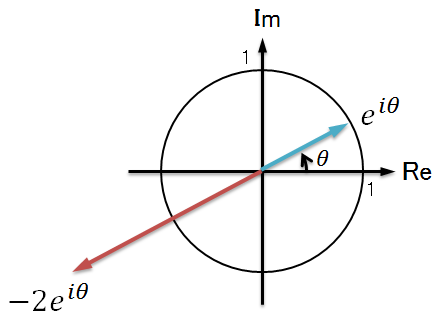

のようになります。
ただ、実際には eiθ の頭に係数はθの値に応じて変化する場合が多く、例えば
(sinθ) e iθ
のθの値を0~360°で変化させるとどうなるか?というと、このよう↓になります。
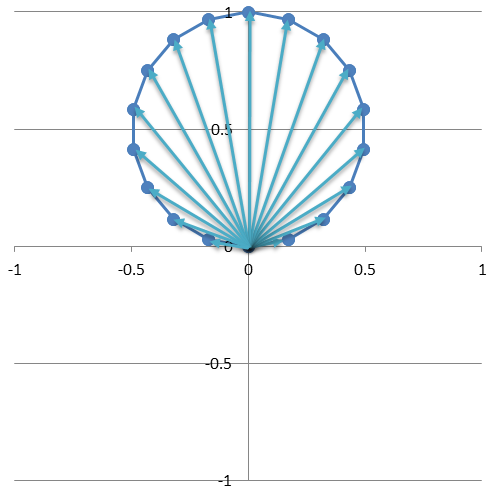

実はフーリエ変換をイメージで覚えるうえで、上図のように思えた事が最大のポイントで、とても嬉しかった~!!!
上図をよ~く見てみると、ベクトルの先端は円を描き、この円の中心が(0, 0.5)の座標になっています。
これを少し言い方を変えると、円の中心へのベクトルは長さ0.5、傾きが+90の位置にあります。
この事は、すでに少しだけフーリエ変換になってます。
と、ここまで説明しといて、例題としては (sinθ) e -iθ の方が良かったかな...ちょっと失敗??
ちなみに(sinθ) e -iθ だと、円の中心は(0, -0.5)の位置に来ます。
複素数、複素関数について、もう少し詳しく知りたい方は、下記ファイルが参考になると思います。
複素関数を学ぶ人のために
http://collie.low-temp.sci.yamaguchi-u.ac.jp/~ashida/work/comp.pdf
←フーリエ変換へ戻る