スタティックリンクライブラリを使うと他のPCへ作成した実行ファイルを移植する時にexeファイルをコピーすればOpenCVをインストールする事なく実行できるので、メリットはあるので、使ってみたいのですが、これが、なかなか分かりづらい。
OpenCV2.3.1ではファイル(OpenCV-2.3.1-win-superpack.exe)をダウンロードし、解凍するとスタティックリンクライブラリらしきフォルダ(staticlib)があるのですが、*.libファイルが不足しているらしく、未解決のシンボルのエラーが出て使う事が出来なさそうです。
そのため、OpenCV-2.3.1-win-superpack.exeのソースからCMakeを使ってスタティックリンクライブラリをビルドしてみました。
CMakeでビルドする方法はOpenCV2.3の入手、ダウンロード、インストール、環境設定
今回OpenCV-2.3.1-win-superpack.exeを c:\
まずCMakeで作成するプロジェクトの保存先のフォルダを作成しておきます。
今回は C:\opencv\userbuild
CMakeを起動し
Where is the source codeに C:/opencv
Where is the source codeに C:/opencv/userbuid
を指定します。
次にConfigure
すると下図のようなウィンドウが開くので、使用するVisual Studioのバージョンを選択します。
Finish BUILD_SHARED_LIBS WHITH_CUDA
次にConfigure BUILD_WITH_STATIC_CRT Configure
すると赤く表示された部分が無くなるので、Generate
するとWhere is the source codeで指定したフォルダ(\userbuild)にソリューションファイル(OpenCV.sln
開いたVisualStudioのメニューからビルド→構成マネージャー
次にINSTALL
左上のアクティブソリューション構成の部分のDebug Release
この状態で、Visual Studioのメニューのビルド→ソリューションのビルド Release Debug
これでWhere is the source codeで指定したフォルダ(\userbuild)内に必要なヘッダファイルとライブラリファイルが作成されます。
スタティックリンクライブラリを使用する方法
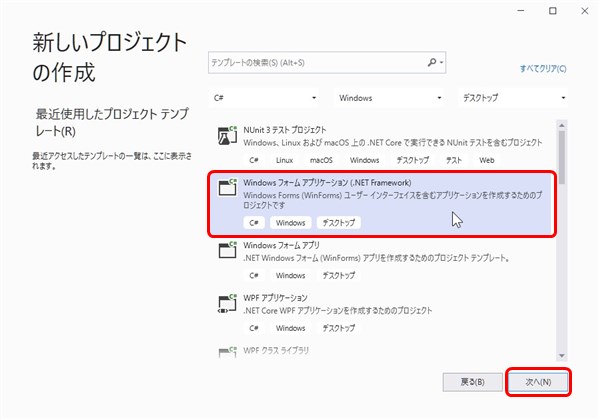
まず、Visual Studioを起動し、ファイル⇒新規作成 Visual C++⇒Win32内のWin32コンソールアプリケーション
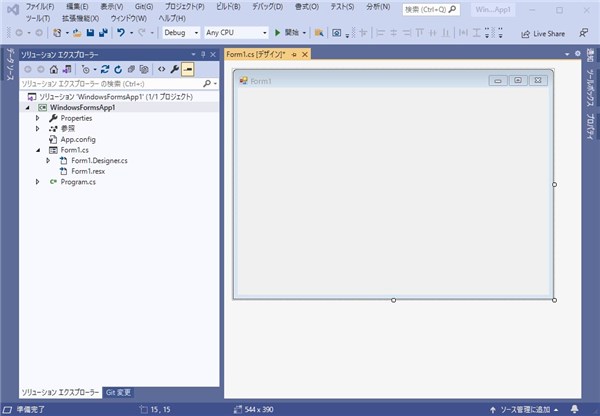
次に表示されたウィンドウで完了
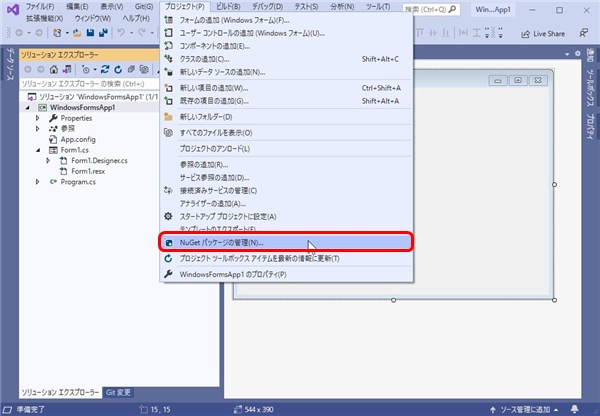
次にVisual Studioのメニューのプロジェクト⇒(プロジェクト名)のプロパティ 構成のプロパティ⇒C/C++⇒全般 追加のインクルードディレクトリ
C:\opencv\userbuild\install\include
同じウィンドウで構成のプロパティ⇒リンカー⇒入力 特性の指定のライブラリの無視
(Debugの場合)
LIBCMTD.lib;msvcprtd.lib
(Releaseの場合)
LIBCMT.lib;msvcprt.lib
を指定します。
これで、ソースコード上に下記のようにヘッダファイル(*.hpp)とライブラリファイル(*.lib)の設定を行うと、OpenCVをスタティックリンクライブラリとして使用する事が可能になります。
下記はWebカメラを撮影する簡単なコードです。
// OpenCVStaticSample.cpp : コンソール アプリケーションのエントリ ポイントを定義します。
//
#include "stdafx.h"
//*******************************************************************************
// プロジェクトの設定
// ①プロジェクトのプロパティ⇒C/C++⇒全般 の追加のインクルードディレクトリに
// C:\opencv\userbuild\install\include
// を追加
// ②プロジェクトのプロパティ⇒リンカー⇒入力 の特定の規定のライブラリの無視に
// Debugのとき
// LIBCMTD.lib;msvcprtd.lib
// Releaseのとき
// LIBCMT.lib;msvcprt.lib
// を追加
//*******************************************************************************
#include "opencv2\\opencv.hpp"
#pragma comment(lib,"comctl32.lib")
#pragma comment(lib,"vfw32.lib") // Video for Windows
#ifdef _DEBUG
//Debugモードの場合
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_core231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_imgproc231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_highgui231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_objdetect231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_contrib231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_features2d231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_flann231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_gpu231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_legacy231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_ts231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_video231d.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\zlibd.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\libtiffd.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\libpngd.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\libjpegd.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\libjasperd.lib")
#else
//Releaseモードの場合
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_core231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_imgproc231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_highgui231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_objdetect231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_contrib231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_features2d231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_flann231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_gpu231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_legacy231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_ts231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\lib\\opencv_video231.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\zlib.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\libtiff.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\libpng.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\libjpeg.lib")
#pragma comment(lib,"C:\\opencv\\userbuild\\install\\share\\OpenCV\\3rdparty\\lib\\libjasper.lib")
#endif
int _tmain(int argc, _TCHAR* argv[])
{
// カメラオープン
cv::VideoCapture cap(0);
// カメラがオープンできたかの確認
if(!cap.isOpened()) return -1;
cv::namedWindow("Capture", CV_WINDOW_AUTOSIZE|CV_WINDOW_FREERATIO);
while(1) {
cv::Mat frame;
cap >> frame; // キャプチャ
// 様々な処理
// ...
cv::imshow("Capture", frame); // 表示
if(cv::waitKey(30) >= 0)
{
cv::imwrite("cap.png", frame);
break;
}
}
return 0;
}
※実際に開発したPCとは別のPCへ実行ファイル(*.exe)を移植する場合、別途、C++のランタイムが必要となります。
移植先のPCに開発したPCで使用したVisual Studioと同じバージョンがインストールされていない場合、C++の再頒布パッケージというものをインストールします。
Visual Studio 2010 C++(32bit)の場合、以下の場所よりダウンロードして下さい。
Microsoft Visual C++ 2010 SP1 再頒布可能パッケージ (x86)
これで、OpenCVをスタティックリンクライブラリで使えていると思うのですが、この特定のライブラリの無視する部分と、comctl32.libとvfw32.libを追加しないといけない部分が分かりづらかった...
ただ、warning LNK4049のワーニングが幾つか出てしまい、いまいち、このwarningの消し方は分かりませんでした...
←OpenCVへ戻る