ファイル名を見ても分かるように、このファイルはWindows 32bit版のVisual Studio 2010用にコンパイルされたファイルなのですが、64bit版のOS環境下でも32bitで動作します。
また、VS2010以外でも、Microsoft Visual C++ 2010 再頒布可能パッケージをインストールすることで、旧バージョンのVisual Studioでも開発する事が可能です。
typedef struct _IplImage
{
int nSize; /* sizeof(IplImage) */
int ID; /* version (=0)*/
int nChannels; /* Most of OpenCV functions support 1,2,3 or 4 channels */
int alphaChannel; /* Ignored by OpenCV */
int depth; /* Pixel depth in bits: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16S,
IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F are supported. */
char colorModel[4]; /* Ignored by OpenCV */
char channelSeq[4]; /* ditto */
int dataOrder; /* 0 - interleaved color channels, 1 - separate color channels.
cvCreateImage can only create interleaved images */
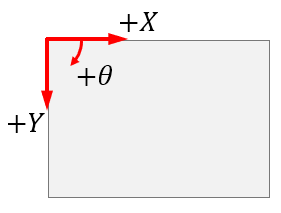
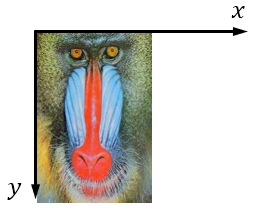
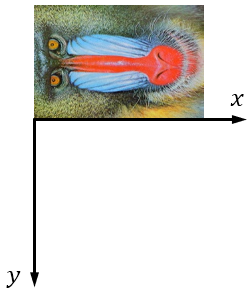
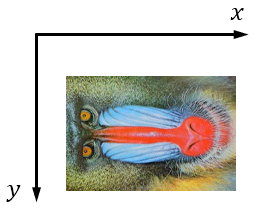
int origin; /* 0 - top-left origin,
1 - bottom-left origin (Windows bitmaps style). */
int align; /* Alignment of image rows (4 or 8).
OpenCV ignores it and uses widthStep instead. */
int width; /* Image width in pixels. */
int height; /* Image height in pixels. */
struct _IplROI *roi; /* Image ROI. If NULL, the whole image is selected. */
struct _IplImage *maskROI; /* Must be NULL. */
void *imageId; /* " " */
struct _IplTileInfo *tileInfo; /* " " */
int imageSize; /* Image data size in bytes
(==image->height*image->widthStep
in case of interleaved data)*/
char *imageData; /* Pointer to aligned image data. */
int widthStep; /* Size of aligned image row in bytes. */
int BorderMode[4]; /* Ignored by OpenCV. */
int BorderConst[4]; /* Ditto. */
char *imageDataOrigin; /* Pointer to very origin of image data
(not necessarily aligned) -
needed for correct deallocation */
}
IplImage;
LINK : fatal error LNK1104: ファイル ‘×××.lib’ を開くことができません。 fatal error C1083: include ファイルを開けません。’cv.h’: No such file or directory
*.libファイル、*.hファイルが指定したフォルダに存在しているか?
また、*.libファイル、*.hのファイル名が正しいか?
確認してみて下さい。
fatal error C1189: #error : ERROR: EMM intrinsics not supported in the pure mode! 共通言語ランタイムサポートの設定を/clr:pureから/clrに変更して下さい。
IMPORTANT: READ BEFORE DOWNLOADING, COPYING, INSTALLING OR USING.
By downloading, copying, installing or using the software you agree to this license.
If you do not agree to this license, do not download, install,
copy or use the software.
License Agreement
For Open Source Computer Vision Library
Copyright (C) 2000-2008, Intel Corporation, all rights reserved.
Copyright (C) 2008-2009, Willow Garage Inc., all rights reserved.
Third party copyrights are property of their respective owners.
Redistribution and use in source and binary forms, with or without modification,
are permitted provided that the following conditions are met:
* Redistribution's of source code must retain the above copyright notice,
this list of conditions and the following disclaimer.
* Redistribution's in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the documentation
and/or other materials provided with the distribution.
* The name of the copyright holders may not be used to endorse or promote products
derived from this software without specific prior written permission.
This software is provided by the copyright holders and contributors "as is" and
any express or implied warranties, including, but not limited to, the implied
warranties of merchantability and fitness for a particular purpose are disclaimed.
In no event shall the Intel Corporation or contributors be liable for any direct,
indirect, incidental, special, exemplary, or consequential damages
(including, but not limited to, procurement of substitute goods or services;
loss of use, data, or profits; or business interruption) however caused
and on any theory of liability, whether in contract, strict liability,
or tort (including negligence or otherwise) arising in any way out of
the use of this software, even if advised of the possibility of such damage.























































")

")