

私のお世話になっている会社が無償で数値演算ライブラリを公開してくれました。
数値演算ライブラリ eyemLib
http://www.eyedeal.co.jp/product/eyemLib.html
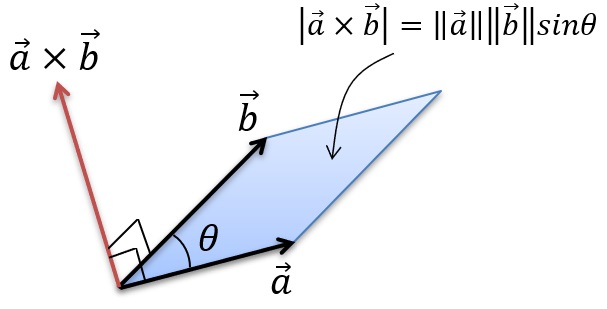
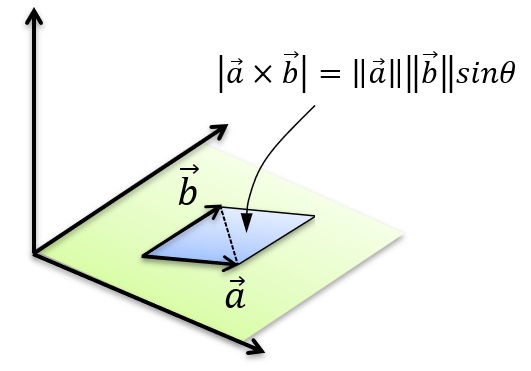
内容的には行列演算(ベクトル演算)、近似計算、幾何計算、計算幾何、キャリパー(寸法計測)向け処理、二次元点群マッチング、カメラキャリブレーション など。
ちょっとキャリパー色が強いかな?
これらの関数は、おそらく同社が開発している位置決めライブラリや寸法計測パッケージなどでベースに使っているライブラリと思われ...
これらの数値演算に関してはOpenCVでも同じ様な関数はありますが、OpenCVだと無償で商用に使えますが、著作権表示がちょっと抵抗があるな~という人には、ちょうどいいと思います。
ライブラリもスタティックライブラリ(*.lib)なので、ライブラリの使用を完全に隠す事ができます。
このライブラリは完全フリーで商用使用可、著作権表示義務なしだそうです。
ただし、使用は自己責任にてノンサポートとなっています。
この会社は、画像処理アルゴリズム開発を得意とするスペシャル集団なので、関数もちょっとマニアックな感じ。
近似処理も直線、円、楕円の近似がありますが、それぞれロバスト推定に対応していたり...
個人的には各種行列演算があって、逆行列や固有値、固有ベクトルの関数もあるのは嬉しいかな?
関数マニュアルも付いているので、スタティックライブラリを使った事がある人で、それぞれの関数の用途を知っている人には重宝すると思います。
数値演算ライブラリ eyemLib
http://www.eyedeal.co.jp/product/eyemLib.html




























































































































")

")




")



")

")

")




















