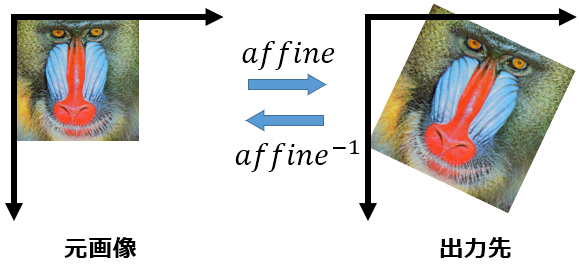
ただし、一般的には元画像から出力先へのアフィン変換で考える場合が多いので、元画像から出力先へのアフィン変換行列(affine)を計算して、最後にアフィン変換行列の逆行列(affine-1)をtransform()メソッドの data へ渡します。
つまり、変換前の座標を(x, y)、変換後の座標を(x’, y’)とすると、アフィン変換の行列は
$$\left(\begin{array}{c}x^{‘}\\ y^{‘}\\ 1\end{array}\right)=
\left(\begin{array}{c}a & b & c\\ d & e & f \\ 0 & 0 & 1\end{array}\right)
\left(\begin{array}{c}x\\ y \\ 1\end{array}\right)$$
となりますが、この逆の変換を計算し、
$$\left(\begin{array}{c}x\\ y\\ 1\end{array}\right)=
\left(\begin{array}{c}a & b & c\\ d & e & f \\ 0 & 0 & 1\end{array}\right)^{-1}
\left(\begin{array}{c}x^{‘}\\ y^{‘} \\ 1\end{array}\right)$$
から、逆行列の部分を
$$\left(\begin{array}{c}a^{‘} & b^{‘} & c^{‘}\\ d^{‘} & e^{‘} & f^{‘} \\ 0 & 0 & 1\end{array}\right)=
\left(\begin{array}{c}a & b & c\\ d & e & f \\ 0 & 0 & 1\end{array}\right)^{-1}$$
$$s\left(\begin{array}{c}x^{‘}\\ y^{‘}\\ 1\end{array}\right)
=
\left(\begin{array}{c}a & b & c\\ d & e & f\\ g & h & 1\end{array}\right)
\left(\begin{array}{c}x\\ y \\ 1\end{array}\right)$$
となります。
アフィン変換の行列と比較すると、変換後の座標の頭に s が付いているのと、アフィン変換行列の3行目の要素が 0 だった部分に g と h が登場しています。
このホモグラフィ変換の行列の計算は以下のようにします。
$$s\left(\begin{array}{c}x^{‘}\\ y^{‘}\\ 1\end{array}\right)
=
\left(\begin{array}{c}a & b & c\\ d & e & f\\ g & h & 1\end{array}\right)
\left(\begin{array}{c}x\\ y \\ 1\end{array}\right)$$
$$\left(\begin{array}{c}x^{’}\\ y^{‘}\\1\end{array}\right)=\left(\begin{array}{c}a & b & c\\ d & e & f\\0 & 0 & 1\end{array}\right)\left(\begin{array}{c}x\\ y \\ 1\end{array}\right)$$
アフィン変換行列を求めるという事は、この未知数の a, b, c, d, e, f を求める事になります。
$$\left(\begin{array}{c}x^{’}\\ y^{‘}\\1\end{array}\right)=\left(\begin{array}{c}a & b & c\\ d & e & f\\0 & 0 & 1\end{array}\right)\left(\begin{array}{c}x\\ y \\ 1\end{array}\right)$$
でしたが、この式を展開すると
$$x^{‘}=ax + by + c$$
$$y^{‘}=dx + ey + f$$
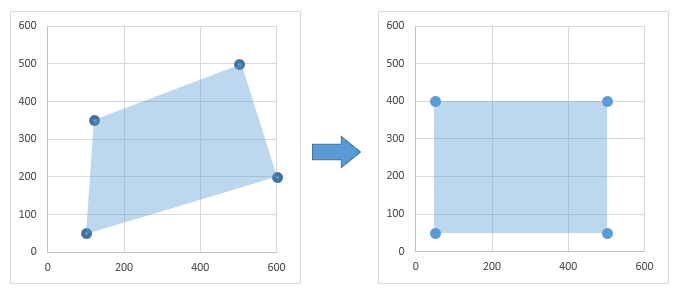
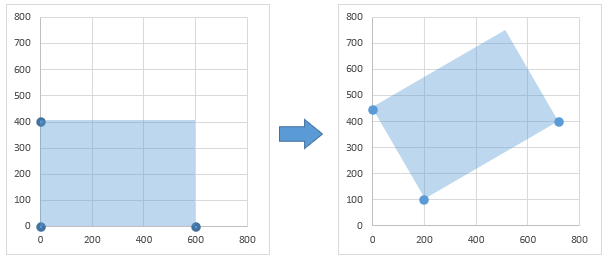
この式にアフィン変換前の3点、アフィン変換後の3点の3ペアの座標を代入すると、
$$x_0^{‘}=ax_{0} + by_{0} + c$$
$$y_0^{‘}=dx_{0} + ey_{0} + f$$
$$x_1^{‘}=ax_{1} + by_{1} + c$$
$$y_1^{‘}=dx_{1} + ey_{1} + f$$
$$x_2^{‘}=ax_{2} + by_{2} + c$$
$$y_2^{‘}=dx_{2} + ey_{2} + f$$
となります。
式が6本で未知数が a ~f の6個なので、この連立方程式を求めれば、アフィン変換行列も求まります。