ラインセンサカメラを選定するには、おおむね以下の仕様を決める必要があります。
| 画素数 |
512, 1024, 2048, 4096, 6144, 7450, 8192, 12288, 16384など |
| 画素サイズ |
4.7, 5, 7, 14 μmなど |
| データレート |
20,40,50,60,80,120,160,320,640Mhzなど |
| カメラ出力 |
CoaXPress,CameraLink,デジタル,アナログなど |
| レンズマウント |
Cマウント, Fマウント,M42,M72 など |
| その他 |
露光制御、シェーディング補正、アンチブルーミングの有無、
本体寸法など |
上記の組み合わせは、それぞれ任意に組み合わせる事が出来る訳ではありませんが、ある程度意識する必要があります。
例えば、入手しやすいニコンの一眼レフ用のレンズ(Fマウント)を用いたい場合は、最大の画素数は7450画素ぐらいまでとなります。センサ長(画素サイズ×画素数)が43mmを超える場合はご注意下さい。
それ以上の画素数を使用する場合は、レンズマウントもM42、M72となり、レンズも高価なものとなります。
画素数、画素サイズ
画素数を決めるには、撮影する視野幅、撮影分解能(mm/pix)を決める必要があります。
例えば、
視野幅 300mm
最小欠陥サイズ 0.2mm
だとすると、まずは最小の欠陥を検出するのに何画素必要か?が重要になります。
何画素必要かは画像処理担当者と相談するなり、実際には実験しながら決める場合も多いと思いますが、ここでは4画素必要だとすると、
画素分解能 = (最小欠陥サイズ) / (必要画素数)
= 0.2 / 4
= 0.05(mm/pix)
となります。
あとは視野幅より
必要画素数 = 視野幅 / 画素分解能
= 300 / 0.05
= 6000画素
これより、6000画素以上のカメラ6144画素を選定します。
ただし、経験的には必要な画像分解能が約10μm以下となる場合は、レンズの限界でクッキリと10μmの物が撮影できなくなってくるので、ご注意下さい。
また、この如何にクッキリと撮影できるか?という問題ですが、カメラの中心付近で撮影するのと、量端部分で撮影するのとでは、性能が異なり量端に近いほど不利となります。
ここで重要な事は大は小を兼ねないということ。
同じデータレートの場合、画素数が少ない方がより高速にスキャンすることができます。
また、画素数が少ない方がラインセンサの画素サイズの大きいカメラを選定できる可能性が
あるので、画素サイズの大きい方が一般的に明るく撮影する事が出来ます。
データレート、スキャンレート
データレートは画像のデータを吐き出すための同期信号の周波数を表し、320MHz、640MHzというような表現をします。
スキャンレートは1ライン分のデータを1秒間あたり何ライン取得するか?の値で、40kHzや70kHzというように表現します。一般にカメラの性能を表す場合は最速のスキャンレートで表す場合が多いです。
また、スキャンレートはHzの逆数を取って、25μSec、14μSecと表現する場合もあります。


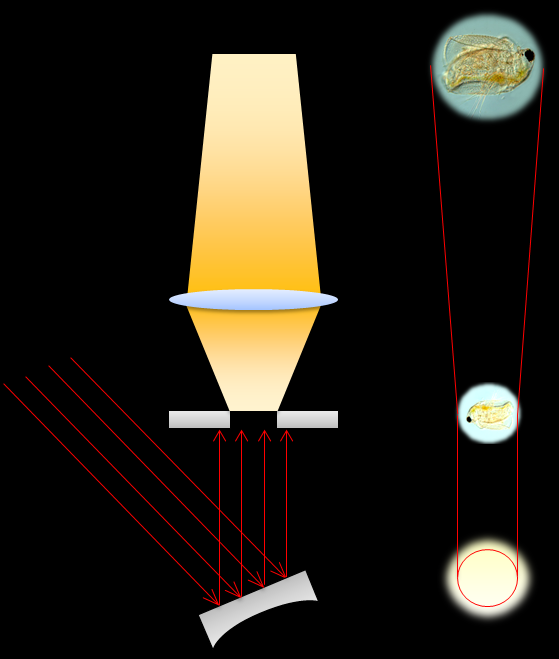
スキャンレートが遅い(スキャン間隔の時間が長い)と縦方向につぶれた画像となり、
スキャンレートが速い(スキャン間隔の時間が短い)と縦方向にまのびした画像となります。
  |
  |
  |
| スキャンレートが遅い |
スキャンレートが最適 |
スキャンレートが速い |
スキャンレートが速いと必然的に露光時間も短くなってしまうので、画像が暗くなってしまいます。
スキャンレートが遅いと露光時間を長く取る事ができるので、明るく撮影する事が出来るのですが、
露光時間に関しては露光時間≒スキャンレートとなるカメラや、露光時間をスキャンレートとは別に
設定できるカメラがあります。(当然、スキャンレートよりも長い露光時間の設定はできません。)
露光時間を設定できないカメラの場合は、カメラのゲイン設定やレンズの絞りなどで画像の明るさを
調整します。
[計算例]
ワークの送り速度 200mm/sec
送り方向の分解能 0.05mm/pix
の場合、
スキャンレート = (送り速度) / (分解能) = 200 / 0.05 = 4kHz
= (分解能) / (送り速度) = 0.05 / 200 = 250μsec
となるので、最速スキャンレートの4kHz以上のラインセンサカメラを選定します。
スキャンレートは検査処理能力に直結するので、速くしがちですが、スキャンレートが速いと露光時間も短くなり、その分、明るい照明が必要となります。また、スキャンレートが速いと、カメラのケーブル長も長くするとノイズの影響を受けやすく、あまり長くする事ができません。最悪、1Mでないとダメなケースもあるので、ご注意下さい。最近では、この問題を解決するため、ケーブルの中間部分を光ファイバーに変換しケーブル長を延ばしたり、高速のスキャンレートが可能でありながら、ケーブル長を延ばす事のできるCoaXPressという規格も登場しています。
カメラ出力
カメラのデータ出力にはCoaXPRess、CameraLinkとデジタル、アナログとがあります。
現状では低速低分解能のカメラではアナログ、高速高分解能のカメラではCameraLinkが多くなっていますが、カメラリンクケーブルは規格品ですので、ケーブル長が1、2、5、7、10、15mのいづれかになります。
また、高速データレートのラインセンサカメラとなると、使用できるケーブル長も制限される場合が
ありますのでご注意下さい。
レンズマウント
ラインセンサカメラの場合、センサ長が比較的長いので、
ニコンのFマウント もしくは
ペンタックスのKマウント
を使うのが一般的です。(Fマウントの方が多い)
これらは35mmフィルムレンズ用のレンズですので、センサ長が43mmまでのカメラで使用が可能です。
他にも、よりガタの無いようにレンズを固定するため、M42のねじマウントを使ったり、
センサ長が43mmを超える場合は、M42、M72のねじマウントを使う場合があります。
レンズメーカについては光学部品/カメラバイヤーズガイドのページを参照下さい。
レンズの選定についてはレンズ選定(視野、撮影距離など)のページを参照下さい。
ただし、経験的には、Fマウントのレンズを使う場合には、視野やワーキングディスタンスなどから、レンズの焦点距離を計算して、レンズを選定するよりもニコンのマイクロニッコール55mmのレンズを用いてワーキングディスタンスを調整し、撮影したい視野幅に合わせこむ方が綺麗な画像を撮影できる場合が多いです。
まとめ
カメラの選定については照明や画像処理なども考慮し選定を行って下さい。
むやみに撮影分解能やスキャンレートを上げてしまうと、高価なカメラ、レンズ、照明、画像入力ボードが必要となってしまうので、トータルバランスが重要です。
ラインセンサカメラのメーカについては、カメラ接続リストとカメラメーカーリンクのページのPDFファイルが参考になると思います。
(※私の会社のページですが、うちのボードを選択して頂けると嬉しいです。)
他にもマビックというマシンビジョンの方法をまとめたホームページに産業用CCD/CMOSカメラ検索CameraChoiceというページがあるので、こちらも参考になると思います。





































































")
")

")
")
")
")













")











